ZLTECH 86 մմ Nema34 Nema34 36/48V 500/750W 19A 3000RPM BLDC շարժիչ փորագրման մեքենայի համար





Պարամետրեր
| Նյութ | ZL86DBL500-36V | ZL86DBL500-48V | ZL86DBL750 |
| Փուլ | 3 փուլ | 3 փուլ | 3 փուլ |
| Չափը | Նեմա34 | Նեմա34 | Նեմա34 |
| Լարման (V) | 36 | 48 | 48 |
| Գնահատված հզորություն (Վտ) | 500 | 500 | 750 թ |
| Գնահատված ընթացիկ (A) | 19 | 14 | 17 |
| Պիկ հոսանք (A) | 57 | 42 | 51 |
| Գնահատված ոլորող մոմենտ (Նմ) | 1.6 | 1.6 | 2.4 |
| Պիկ մոմենտ (Նմ) | 4.8 | 4.8 | 7.2 |
| Գնահատված արագություն (RPM) | 3000 | 3000 | 3000 |
| Լեհերի թիվ (զույգեր) | 4 | 4 | 4 |
| Դիմադրություն (Ω) | 0,15±10% | 0,30±10% | 0.10±10% |
| Ինդուկտիվություն (mH) | 0.30±20% | 0.60±20% | 0.30±20% |
| Ke (RMS) (V/RPM) | 6.2x10-3 | 8,5x10-3 | 8,5x10-3 |
| Ռոտորի իներցիա (kg.cm²) | 0.42 | 0.42 | 2.4 |
| Ոլորման գործակից (Nm/A) | 0,09 | 0,115 | 0,115 |
| Լիսեռի տրամագիծը (մմ) | 14 | 14 | 14 |
| Լիսեռի երկարությունը (մմ) | 32 | 32 | 32 |
| Շարժիչի երկարությունը (մմ) | 124 | 124 | 152 |
| Քաշը (կգ) | 2.6 | 2.6 | 4 |
| Հարմարեցված BLDC վարորդ | ZLDBL5030S | ZLDBL5015 | ZLDBL5030S |
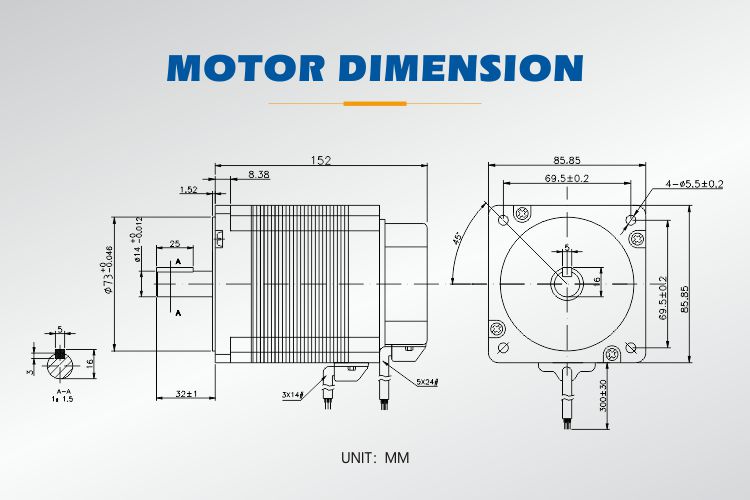
Չափս
.jpg)
.jpg)
Դիմում

Փաթեթավորում

Արտադրության և ստուգման սարք

Որակավորում և սերտիֆիկացում

Գրասենյակ և գործարան

Համագործակցություն

Գրեք ձեր հաղորդագրությունը այստեղ և ուղարկեք այն մեզ
Ապրանքների կատեգորիաներ
-

ZLTECH 13 դյույմանոց անիվի շարժիչ օդաճնշական անվադողով ...
-

ZLTECH 6.5inch 24V-48V 150W 120kg BLDC էլեկտրական...
-

ZLTECH 6.5 դյույմ 24-48VDC 350W Անիվի հանգույց շարժիչի համար...
-

ZLTECH Nema23 կոդավորիչ CANopen ինտեգրված քայլեր...
-

DM8072 ZLTECH 2 փուլ 24V-90V DC 2.4A-7.2A բրուս...
-

ZLTECH 160 մմ 400 կգ ծանրաբեռնվածություն 16~70 հարաբերակցությամբ փոխանցման անիվ





