ZLTECH 86 մմ Nema34 24-50VDC 3000RPM BLDC շարժիչ փորագրման մեքենայի համար





Առանց խոզանակի շարժիչի բնութագրերը
1) Շարժիչը փոքր է չափերով և ավելի թեթև քաշով:Ասինխրոն շարժիչի համար նրա ռոտորը բաղկացած է երկաթե միջուկից՝ ատամներով և ակոսներով, իսկ ակոսներն օգտագործվում են ինդուկցիոն ոլորուններ տեղադրելու համար՝ հոսանք և ոլորող մոմենտ ստեղծելու համար:Բոլոր ռոտորների արտաքին տրամագիծը չպետք է չափազանց փոքր լինի:Միևնույն ժամանակ, մեխանիկական կոմուտատորի առկայությունը նաև սահմանափակում է արտաքին տրամագծի կրճատումը, իսկ առանց խոզանակի շարժիչի խարույկը գտնվում է ստատորի վրա, ուստի ռոտորի արտաքին տրամագիծը կարող է համեմատաբար կրճատվել:
2) Շարժիչի կորուստը փոքր է, դա պայմանավորված է նրանով, որ խոզանակը չեղարկվում է, և էլեկտրոնային շրջադարձն օգտագործվում է մեխանիկական շրջադարձը փոխարինելու համար, ուստի շարժիչի շփման կորուստը և էլեկտրական կորուստը վերացվում են:Միևնույն ժամանակ, ռոտորի վրա մագնիսական ոլորուն չկա, ուստի էլեկտրական կորուստը վերացվում է, և մագնիսական դաշտը ռոտորի վրա երկաթի սպառում չի առաջացնի:
3) Շարժիչի ջեռուցումը փոքր է, դա պայմանավորված է նրանով, որ շարժիչի կորուստը փոքր է, իսկ շարժիչի արմատուրային ոլորունը գտնվում է ստատորի վրա, ուղղակիորեն միացված է պատյանին, ուստի ջերմության ցրման վիճակը լավ է, ջերմային հաղորդման գործակիցը մեծ է:
4) բարձր արդյունավետություն.Չնայած առանց խոզանակի շարժիչը լայնորեն օգտագործվում է և ունի հզորության մեծ տիրույթ, տարբեր արտադրանքների կիրառման արդյունավետությունը նույնպես տարբեր է:Օդափոխիչի արտադրանքներում արդյունավետությունը կարող է բարելավվել 20-30% -ով:
5) արագության կարգավորման կատարումը լավ է, որպեսզի պոտենցիոմետրի միջոցով առանց խոզանակի շարժիչը կարգավորի լարումը, որպեսզի հասնի աստիճանական կամ փոխանցման արագության կարգավորմանը, ինչպես նաև PWM աշխատանքային ցիկլի արագության կարգավորումը և զարկերակային հաճախականության արագության կարգավորումը:
6) Ցածր աղմուկ, փոքր միջամտություն, ցածր էներգիայի սպառում, մեծ մեկնարկային ոլորող մոմենտ, առանց մեխանիկական շփման, որն առաջանում է հետընթացից:
7) Բարձր հուսալիություն, երկար սպասարկում, խոզանակների անհրաժեշտությունը վերացնելով շարժիչի հիմնական անսարքությունների աղբյուրը վերացնելու համար, էլեկտրոնային կոմուտատորի շարժիչի ջեռուցումը կրճատվում է, շարժիչի կյանքը երկարաձգվում է:
Պարամետրեր
| Նյութ | ZL86DBL500-36V | ZL86DBL500-48V | ZL86DBL750 |
| Փուլ | 3 փուլ | 3 փուլ | 3 փուլ |
| Չափը | Նեմա34 | Նեմա34 | Նեմա34 |
| Լարման (V) | 36 | 48 | 48 |
| Գնահատված հզորություն (Վտ) | 500 | 500 | 750 թ |
| Գնահատված ընթացիկ (A) | 19 | 14 | 17 |
| Պիկ հոսանք (A) | 57 | 42 | 51 |
| Գնահատված ոլորող մոմենտ (Նմ) | 1.6 | 1.6 | 2.4 |
| Պիկ մոմենտ (Նմ) | 4.8 | 4.8 | 7.2 |
| Գնահատված արագություն (RPM) | 3000 | 3000 | 3000 |
| Լեհերի թիվ (զույգեր) | 4 | 4 | 4 |
| Դիմադրություն (Ω) | 0,15±10% | 0,30±10% | 0.10±10% |
| Ինդուկտիվություն (mH) | 0.30±20% | 0.60±20% | 0.30±20% |
| Ke (RMS) (V/RPM) | 6.2x10-3 | 8,5x10-3 | 8,5x10-3 |
| Ռոտորի իներցիա (kg.cm²) | 0.42 | 0.42 | 2.4 |
| Ոլորման գործակից (Nm/A) | 0,09 | 0,115 | 0,115 |
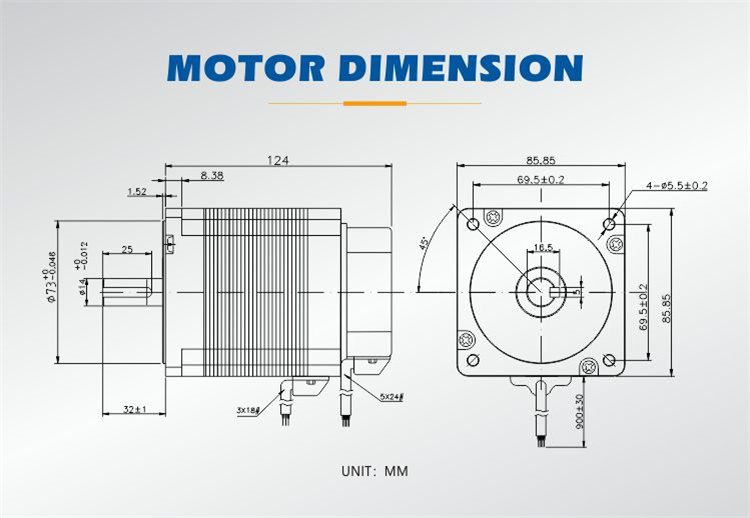
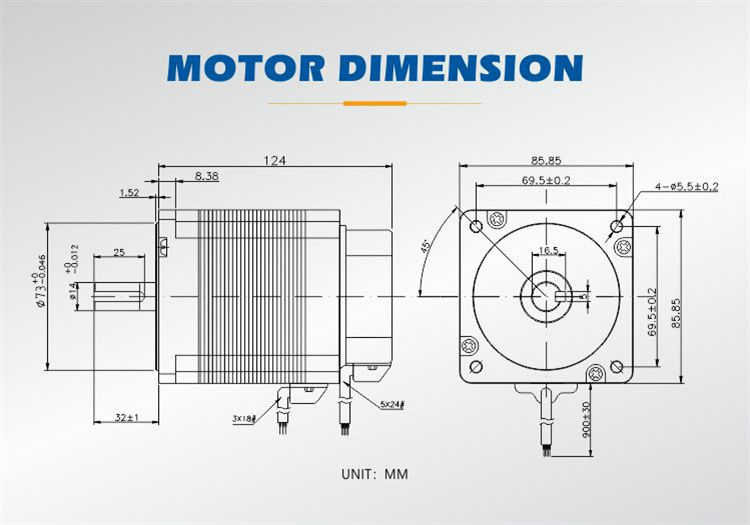
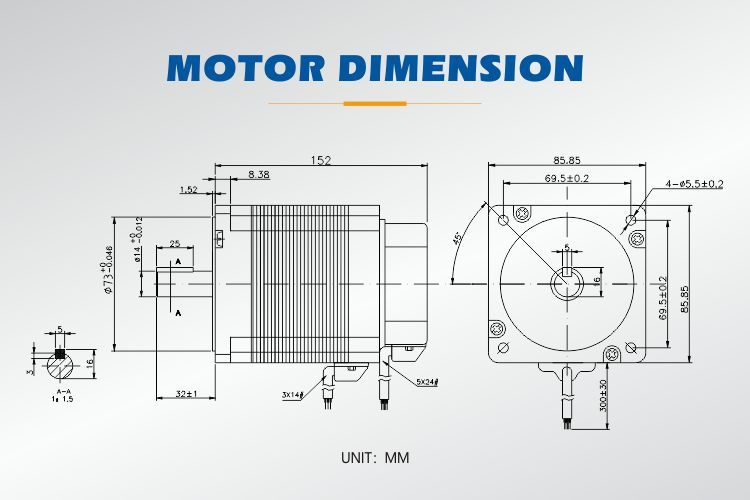
| Լիսեռի տրամագիծը (մմ) | 14 | 14 | 14 |
| Լիսեռի երկարությունը (մմ) | 32 | 32 | 32 |
| Շարժիչի երկարությունը (մմ) | 124 | 124 | 152 |
| Քաշը (կգ) | 2.6 | 2.6 | 4 |
| Հարմարեցված BLDC վարորդ | ZLDBL5030S | ZLDBL5015 | ZLDBL5030S |
Չափս
Դիմում
Անխոզանակ DC շարժիչները լայնորեն օգտագործվում են էլեկտրոնային արտադրության, բժշկական սարքավորումների, փաթեթավորման սարքավորումների, լոգիստիկ սարքավորումների, արդյունաբերական ռոբոտների, ֆոտոգալվանային սարքավորումների և ավտոմատացման այլ ոլորտներում:

Փաթեթավորում

Արտադրության և ստուգման սարք

Որակավորում և սերտիֆիկացում

Գրասենյակ և գործարան

Համագործակցություն
