ZLTECH 3phase 60mm Nema24 24V 100W/200W/300W/400W 3000RPM BLDC շարժիչ տպագրական մեքենայի համար








Անխոզանակ DC էլեկտրական շարժիչը (BLDC) էլեկտրական շարժիչ է, որն սնվում է ուղղակի հոսանքի լարման միջոցով և փոխվում է էլեկտրոնային եղանակով, այլ ոչ թե խոզանակներով, ինչպես սովորական DC շարժիչներում:BLDC շարժիչներն ավելի տարածված են, քան սովորական DC շարժիչները մեր օրերում, սակայն այս տեսակի շարժիչների զարգացումը հնարավոր է եղել միայն 1960-ականներից, երբ մշակվել է կիսահաղորդչային էլեկտրոնիկան:
BLDC և DC շարժիչների նմանություններ
Երկու տեսակի շարժիչներն էլ բաղկացած են դրսից մշտական մագնիսներով կամ էլեկտրամագնիսական պարույրներով ստատորից և կծիկի ոլորուններով ռոտորից, որը կարող է սնուցվել ներսից ուղղակի հոսանքով:Երբ շարժիչը սնուցվում է ուղիղ հոսանքով, ստատորի ներսում մագնիսական դաշտ կստեղծվի՝ կա՛մ ձգելով կամ վանելով ռոտորի մագնիսները:Սա հանգեցնում է նրան, որ ռոտորը սկսում է պտտվել:
Ռոտորը պտտվող պահելու համար անհրաժեշտ է կոմուտատոր, քանի որ ռոտորը կանգ է առնում, երբ այն համահունչ է ստատորի մագնիսական ուժերին:Կոմուտատորը անընդհատ միացնում է DC հոսանքը ոլորունների միջով և, հետևաբար, միացնում է նաև մագնիսական դաշտը:Այս կերպ ռոտորը կարող է շարունակել պտտվել այնքան ժամանակ, քանի դեռ շարժիչը սնուցվում է:
BLDC և DC շարժիչների տարբերությունները
BLDC շարժիչի և սովորական DC շարժիչի միջև ամենաակնառու տարբերությունը կոմուտատորի տեսակն է:DC շարժիչն այդ նպատակով օգտագործում է ածխածնային խոզանակներ:Այս խոզանակների թերությունն այն է, որ դրանք արագ մաշվում են:Ահա թե ինչու BLDC շարժիչներն օգտագործում են սենսորներ, սովորաբար Hall սենսորներ, ռոտորի դիրքը չափելու և որպես անջատիչ գործող տախտակ:Սենսորների մուտքային չափումները մշակվում են տպատախտակի կողմից, որը ճշգրտորեն կրկնում է ռոտորը պտտվելիս փոխելու ճիշտ պահը:
Պարամետրեր
| Նյութ | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| Փուլ | 3 փուլ | 3 փուլ | 3 փուլ | 3 փուլ |
| Չափը | Նեմա24 | Նեմա24 | Նեմա24 | Նեմա24 |
| Լարման (V) | 24 | 24 | 48 | 48 |
| Գնահատված հզորություն (Վտ) | 100 | 200 թ | 300 | 400 |
| Գնահատված ընթացիկ (A) | 5.5 | 11.5 | 8.3 | 12 |
| Պիկ հոսանք (A) | 16.5 | 34.5 | 25 | 36 |
| Գնահատված ոլորող մոմենտ (Նմ) | 0,32 | 0,63 | 0,96 | 1.28 |
| Պիկ մոմենտ (Նմ) | 1 | 1.9 | 3 | 3.84 |
| Գնահատված արագություն (RPM) | 3000 | 3000 | 3000 | 3000 |
| Լեհերի թիվ (զույգեր) | 4 | 4 | 4 | 4 |
| Դիմադրություն (Ω) | 0.22±10% | 0.59±10% | 0.24±10% | |
| Ինդուկտիվություն (mH) | 0,29±20% | 0.73±20% | 0,35±20% | |
| Ke (RMS) (V/RPM) | 4.2x10-3 | 4.2x10-3 | 8.3x10-3 | 8,5x10-3 |
| Ռոտորի իներցիա (kg.cm²) | 0,24 | 0,48 | 0,72 | 0,96 |
| Ոլորման գործակից (Nm/A) | 0.06 | 0.06 | 0,09 | 0.12 |
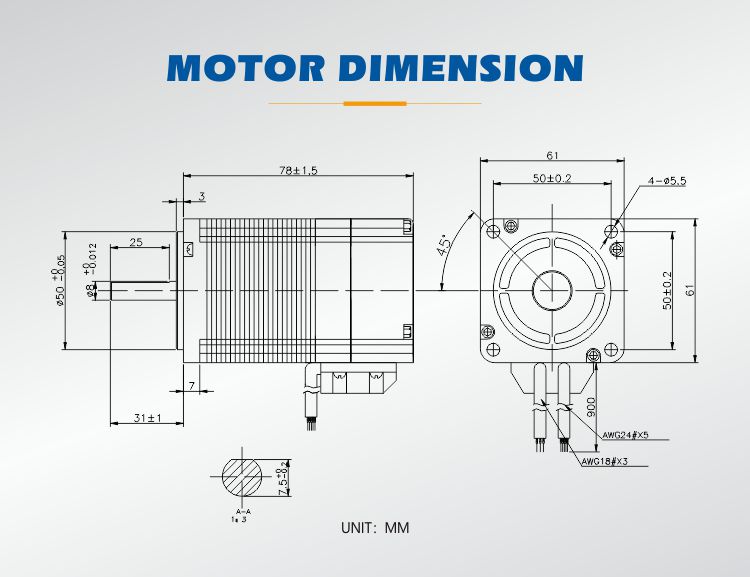
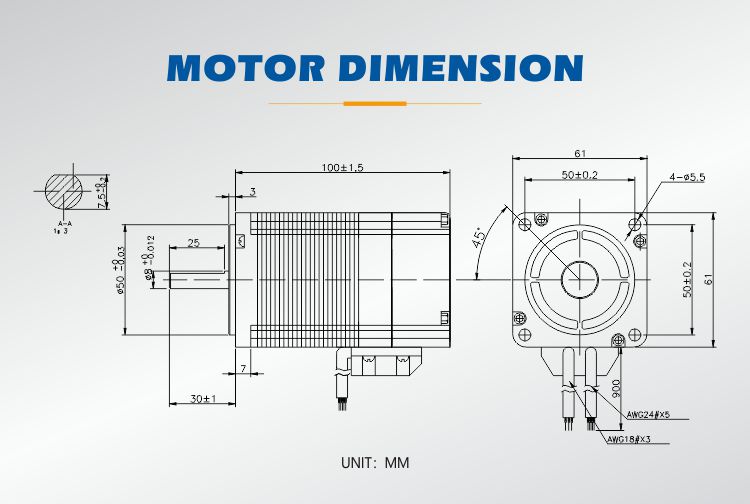
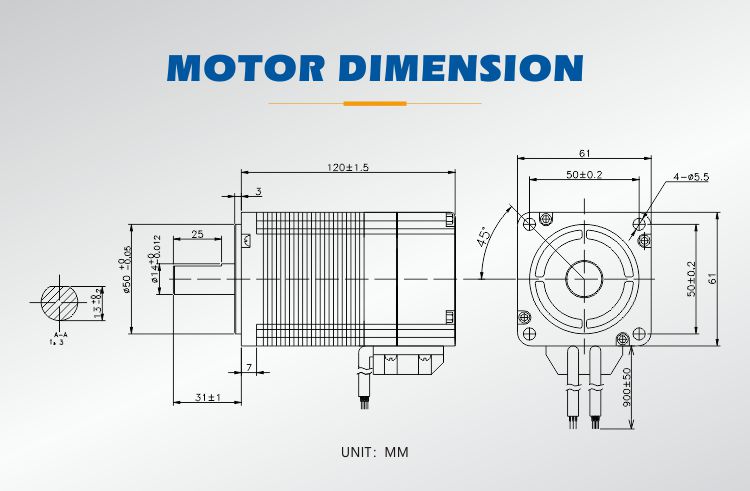
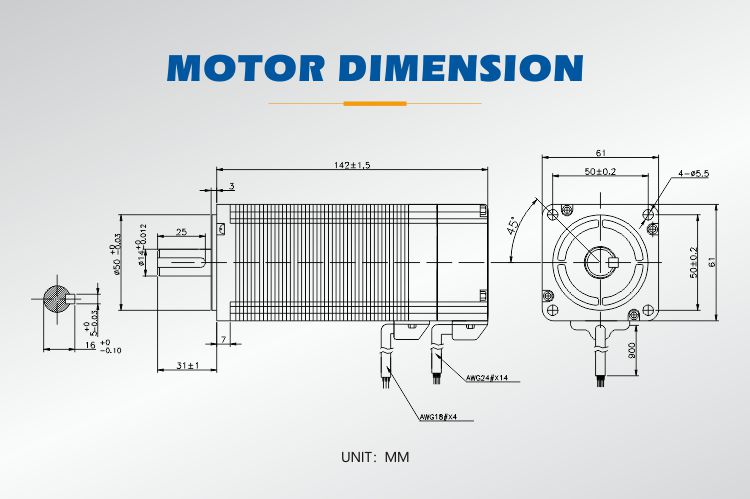
| Լիսեռի տրամագիծը (մմ) | 8 | 8 | 14 | 14 |
| Լիսեռի երկարությունը (մմ) | 31 | 30 | 31 | 31 |
| Շարժիչի երկարությունը (մմ) | 78 | 100 | 120 | 142 |
| Քաշը (կգ) | 0,85 | 1.25 | 1.5 | 2.05 |
| Հարմարեցված BLDC վարորդ | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
Չափս
Դիմում

Փաթեթավորում

Արտադրության և ստուգման սարք

Որակավորում և սերտիֆիկացում

Գրասենյակ և գործարան

Համագործակցություն

Ապրանքների կատեգորիաներ
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A stepper step...
-
M4040 ZLTECH 2 փուլ 12V-40V DC 0.5A-4.0A խոզանակ...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V ինտեգրված քայլ...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 24V-36V 5A DC էլեկտրական Modbus RS485 բրուս...
-

ZLTECH 57mm Nema23 24VDC 1000-wrie փակ հանգույց ...





