ZLTECH 24V-48V DC 30A CAN RS485 servo շարժիչի կարգավորիչի վարորդ CNC մեքենայի համար





Servo վարորդը ժամանակակից շարժման հսկողության կարևոր մասն է և լայնորեն օգտագործվում է ավտոմատացման սարքավորումներում, ինչպիսիք են արդյունաբերական ռոբոտները և CNC հաստոցների կենտրոնները:Servo շարժիչ տեխնոլոգիան, որպես CNC հաստոցների, արդյունաբերական ռոբոտների և այլ արդյունաբերական մեքենաների կառավարման հիմնական տեխնոլոգիաներից մեկը, վերջին տարիներին մեծ ուշադրության է արժանացել:
Սերվո դրայվերը օգտագործում է թվային ազդանշանի պրոցեսոր (DSP) որպես կառավարման միջուկ, որը կարող է իրականացնել ավելի բարդ կառավարման ալգորիթմներ և իրականացնել թվայնացում, ցանցեր և հետախուզություն:Միևնույն ժամանակ, այն ունի անսարքությունների հայտնաբերման և պաշտպանության սխեմաներ, ներառյալ գերլարումը, գերհոսանքը, գերտաքացումը, թերլարումը և այլն:
Սերվո վարորդի կառավարումը բաժանված է դիրքի հանգույցի, արագության հանգույցի և ընթացիկ հանգույցի` ըստ իր հսկողության օբյեկտի դրսից ներս:Համապատասխանաբար սերվո վարորդը կարող է նաև աջակցել դիրքի կառավարման ռեժիմին, արագության կառավարման ռեժիմին և ոլորող մոմենտների կառավարման ռեժիմին:Վարորդի կառավարման ռեժիմը կարող է տրվել չորս եղանակով՝ 1. քանակի անալոգային կարգավորում, 2. պարամետրի կարգավորումների ներքին կարգավորում, 3. զարկերակ + ուղղության կարգավորում, 4. կապի կարգավորում։
Պարամետրերի կարգավորումների ներքին կարգավորումների կիրառումը համեմատաբար քիչ է, և այն սահմանափակ է և աստիճանաբար ճշգրտված:
Անալոգային քանակի կարգավորումների օգտագործման առավելությունը արագ արձագանքումն է:Այն օգտագործվում է շատ բարձր ճշգրտության և բարձր արձագանքման դեպքերում:Դրա թերությունն այն է, որ կա զրոյական դրեյֆ, ինչը դժվարություններ է բերում վրիպազերծման համար:Եվրոպական և ամերիկյան սերվո համակարգերը հիմնականում օգտագործում են այս մեթոդը:
Զարկերակային կառավարումը համատեղելի է ազդանշանային ընդհանուր մեթոդների հետ՝ CW/CCW (դրական և բացասական իմպուլս), զարկերակ/ուղղություն, A/B փուլային ազդանշան:Դրա թերությունը ցածր արձագանքն է:Ճապոնական և չինական սերվո համակարգերը հիմնականում օգտագործում են այս մեթոդը:
Հաղորդակցման կարգավորումը ներկայումս ամենատարածված վերահսկման մեթոդն է:Դրա առավելություններն են արագ կարգավորումը, արագ արձագանքը և շարժման ողջամիտ պլանավորումը:Հաղորդակցման ընդհանուր ռեժիմը ավտոբուսային հաղորդակցությունն է, ինչը հեշտացնում է լարերի միացումը, և դիվերսիֆիկացված կապի արձանագրությունը նաև հաճախորդներին ավելի շատ ընտրություն է տալիս:
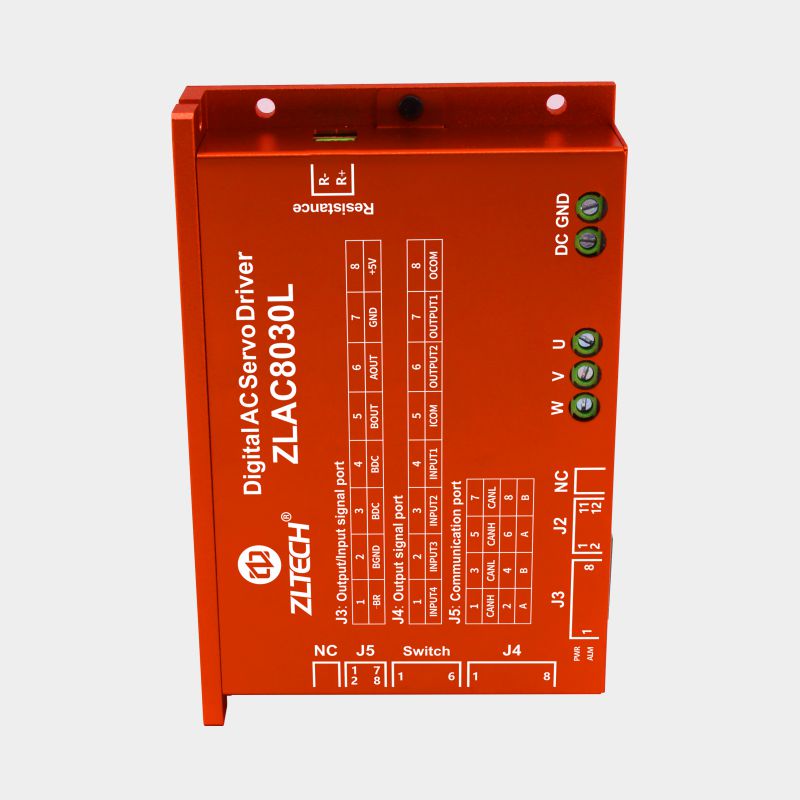
ZLAC8030-ը բարձր էներգիայի և ցածր լարման թվային սերվո վարորդ է, որը ինքնուրույն մշակվել է իրենց կողմից:Դրա համակարգն ունի պարզ կառուցվածք և բարձր ինտեգրում:Այն ավելացնում է ավտոբուսային հաղորդակցության և մեկ առանցքի կարգավորիչի գործառույթներ:Այն հիմնականում համադրվում է 500W-1000W սերվո շարժիչների հետ:
Պարամետրեր
| ԱՊՐԱՆՔԱՅԻՆ ԱՆՈՒՆ | ՍԵՐԲՈ ՎԱՐՈՐԴ |
| P/N | ZLAC8030L |
| ԱՇԽԱՏԱՆՔԱՅԻՆ ԼԱՐՄ (V) | 24-48 թթ |
| ԵԼՔԻ ԸՆԹԱՑՔ (A) | ԳՆԱՀԱՏՎԱԾ 30A, MAX 60A |
| ԿԱՊԻ ՄԵԹՈԴ | CANOPEN, RS485 |
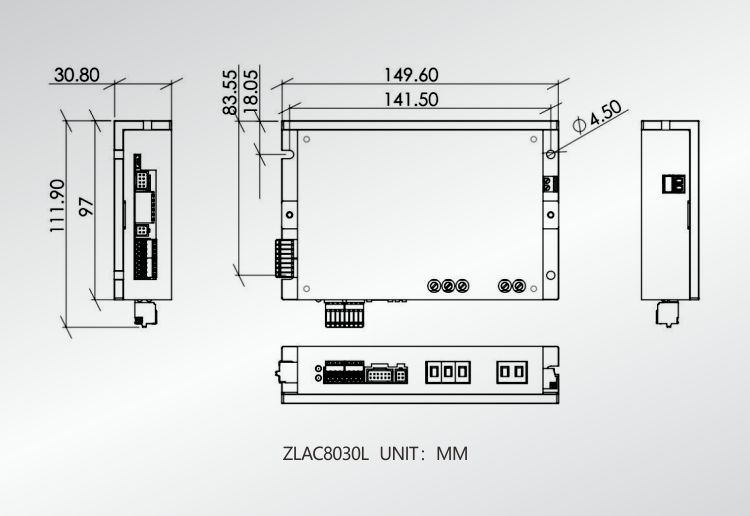
| DIMENSION (մմ) | 149,5 * 97 * 30,8 |
| Հարմարեցված HUB SERVO MOTOR | HIGH POWER HUB SERVO MOTOR |
Չափս
Դիմում

Փաթեթավորում

Արտադրության և ստուգման սարք

Որակավորում և սերտիֆիկացում

Գրասենյակ և գործարան

Համագործակցություն

Ապրանքների կատեգորիաներ
-

ZLTECH 3phase 60mm Nema24 24V 100W/200W/300W/40...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen ինտեգրված ...
-

ZLTECH 6.5inch 24V-48V 150W 120kg BLDC էլեկտրական...
-

ZLTECH 9.5 դյույմ 48V 20N.m հանգույց շարժիչ գյուղատնտեսական...
-

ZLTECH Nema23 կոդավորիչ CANopen ինտեգրված քայլեր...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V ինտեգրված քայլ...





